FyDiK = Fyzikální Diskretizace Kontinua
listopad 2009, Petr Frantík
poslední aktualizace: březen 2011
http://www.kitnarf.cz
Aplikace FyDiK slouží pro provádění interaktivních simulací nelineárních dynamických systémů, které představují modely mechanických konstrukcí. Lze ji použít pro výpočty kmitání konstrukcí, jejich velkých deformací, porušování materiálu, atp. Řešení probíhá numericky a proto není třeba vyžadovat ani předpokládat lineární chování.
Aby bylo možno aplikaci FyDiK spustit, musí být v operačním systému nainstalována Java platforma. Platformu lze stáhnout z adresy http://www.java.com/en/download/manual.jsp. Je-li Java platforma správně nainstalována, lze soubor aplikace fydik2dapplication.jar spustit.
Aplikace FyDiK se spouští buď přímo (kliknutím na soubor fydik2dapplication.jar) nebo z konzoly operačního systému (pokud jí systém disponuje). Spuštění z konzoly je vhodné pro hromadné zpracování a pro sledování podrobných varovných či chybových výpisů. Spuštění z konzoly se provede zapsáním následujícího řetězce do konzoly operačního systému (v případě, že jsme přítomni v adresáři, kde je umístěn soubor fydik2dapplication.jar):
java -jar fydik2dapplication.jar
nebo podrobněji:java -jar fydik2dapplication.jar -projectName [name] -directoryName [path]
kde [name] je jméno projektu a [path] je určení adresáře. Například mějme v adresáři C:/fydik umístěn soubor fydik2dapplication.jar a adresář data, ve kterém je umístěn projekt jménem most (soubory jménem most.model.fdk a most.settings.fdk). Pak by spouštěcí řetězec z adresáře C:/fydik vypadal takto:
java -jar fydik2dapplication.jar -projectName most -directoryName data
Uvedený oddělovač adresářů je závislý na operačním systému.
Model včetně objektů, ze kterých je složen, byl vytvořen tak, aby o něm existoval jasný a jednoduchý fyzikální obraz. Tato koncepce vychází z představy, že je možné tento model v určitém přiblížení reálně vyrobit a ověřit tak přímo jeho vlastnosti či chování. Teprve následně je o takovém modelu uvažováno jako o možné fyzikální diskretizaci spojitého problému. Výhodou tohoto přístupu je zejména jednoduchost a průhlednost výpočtu jeho stavu, čímž odpadá nutnost použití složitého matematického, potažmo programového, aparátu. V konečném důsledku tento přístup vede k jednoduchému a efektivnímu algoritmu, který lze dokonce snadno paralelizovat.
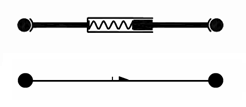 | 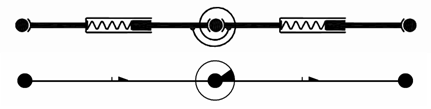 |
| normálová jednotka | ohybová jednotka |
Obr. 1: Základní funkční jednotky modelu (nahoře fyzikální představa, dole vzhled v aplikaci FyDiK)
Na obr. 1 jsou v souladu s jejich fyzikální představou znázorněny dvě základní funkční jednotky: normálová jednotka a ohybová jednotka, složené ze tří základních objektů modelu. Normálová jednotka vznikla spojením dvou hmotných bodů pomocí translační pružiny. Ohybová jednotka vznikla spojením dvou translačních pružin pomocí rotační pružiny. Lze říci, že translační pružina dovoluje vázané normálové přetvoření celku a rotační pružina dovoluje vázané ohybové přetvoření celku.
Každý ze tří základních objektů lze z hlediska implementace v jazyce Java chápat jako objekt i ve smyslu objektově orientovaného programování (viz), tj. má své vlastnosti, stav a rozhraní.
Hmotný bod je klíčovým objektem modelu. Je vybrán jako jediný nositel hmotnosti a jeho stav je určen souřadnicemi xi a yi a složkami rychlosti vxi a vyi. Hmotný bod lze chápat rovněž jako kloub, jelikož zprostředkovává kloubové spojení translačních pružin a navíc tento termín vystihuje reálnou představu.
Množina souřadnic a rychlostí každého hmotného bodu tvoří většinu stavových proměnných modelu. V důsledku akumulace hmotnosti jsou body jedinými příjemci silových interakcí. Ostatní objekty slouží, značně zjednodušeně řečeno, pouze pro jejich zatěžování.
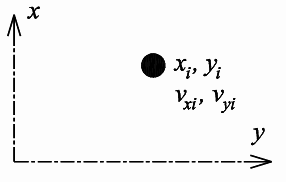
Obr. 2: Hmotný bod
Na obr. 2 je znázorněn hmotný bod s indexem i včetně použitého kartézského souřadného systému a svých stavových proměnných.
Každý hmotný bod má následující atributy: hmotnost mi, počáteční podmínky xi(0)=x0i, yi(0)=y0i, vxi(0)=vx0i, vyi(0)=vy0i, okrajové podmínky (např. předepsaná hodnota stavových proměnných) a funkci viskózního útlumu. Funkce viskózního útlumu určuje velikost tlumící síly Fdi:
 | (1) |
kde vi je vektor rychlosti hmotného bodu a ci, c2i a c3i jsou dané koeficienty.
Domovská stránka aplikace FyDiK je http://fydik.kitnarf.cz.
Wikipedia, the free encyclopedia: Dynamical system, http://en.wikipedia.org
Wikipedia, the free encyclopedia: Nonlinear system, http://en.wikipedia.org
Wikipedia, the free encyclopedia: Object-oriented programming, http://en.wikipedia.org
Macur, J.: Dynamické systémy, http://www.fce.vutbr.cz/studium/materialy/Dynsys