FyDiK = Fyzikální Diskretizace Kontinua
Physical Discretization of Continuum
November 2009, Petr Frantík
last update: March 2011
http://www.kitnarf.cz
The application FyDiK serves for interactive simulation of a nonlinear dynamical system which is representation of a mechanical structure. It is possible to use it for calculation of vibrations of a structure, strain and stress analysis, large deflections of beams, full scale stability analysis, material damage and fracture, etc. Solving and visualizing is provided numerically in real-time and can be controlled by user. Application allows full nonlinearity, state of all objects can be simultaneously saved and numerical model can be changed on the fly.
In order to the execution of the FyDiK application, there has to be a Java platform installed in operating system. The platform can be downloaded from http://www.java.com/en/download/manual.jsp. If the Java platform is installed properly the application JAR file fydik2dapplication.jar can be executed.
The application FyDiK is possible to execute directly (by click on fydik2dapplication.jar) or from the operating system command line (if the system offers it). The command line execution is well suitable for batch processing or for viewing of detailed warnings or exceptions. The execution will be provided by entering the following string to the command line (if we are in the directory where file fydik2dapplication.jar is presented):
java -jar fydik2dapplication.jar
or more in detail:java -jar fydik2dapplication.jar -projectName [name] -directoryName [path]
where [name] is the project name and [path] is the path to the project directory. For example let's have the file fydik2dapplication.jar and subdirectory data in the directory C:/fydik. And in the subdirectory data a project bridge (files bridge.model.fdk and bridge.settings.fdk). Then execution string will have following form:
java -jar fydik2dapplication.jar -projectName bridge -directoryName data
Used directory separator is platform dependent.
A FyDiK application project consists from two XML data files labelled model and settings. As name leads, the model file defines objects of dynamical system and parameters of simulator. The settings file contains parameters of GUI (graphic user interface). There is an example of XML structure of model data file:
<MODEL name="Model" type="2D" start="false" exit="false" >
<SIMULATOR time="0" timeStep="0.001" method="2" timeSpeed="1" fps="25" timeBreak="0" />
<MASSPOINT index="0" dampingCoef="0.1" initMass="1.0" initCoordX="0.0" />
<MASSPOINT index="1" dampingCoef="0.1" initMass="2.0" initCoordX="1.0" />
<TRANSLATIONALSPRING index="0" length="1.0" massObject1Index="0" massObject2Index="1" />
</MODEL>
Such data file can be easy generated, edited and fixed.
FyDiK2D model is designed for simple and clear physical representation and functionality. On fig. 1 two basic functional units are shown: normal unit and bending unit, composed from three basic model objects. The normal unit originates by connection of two mass points with translational spring. The bending unit originates by connection of two translational springs by rotational spring. A translational spring allows forced normal displacement of the normal unit and a rotational spring allows forced bending displacement of the bending unit.
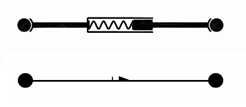 |  |
| normal unit | bending unit |
Fig. 1: Basic functional units (top physical representation, bottom FyDiK application representation)
Each of three objects can be from the implementation point of view understand as an object in the sense of object oriented programming (see), e.g. it has attributes, state variables and methods.
Mass point is key object of the model. It is chosen to carry the mass. Its state is given by state variables, which are coordinates xi, yi and velocity components vxi, vyi. Mass point can be also understands as a mass hinge, because it transmits forces between two connected translational springs and this term represents well its physical functionality.
Set of coordinates and velocity components of every mass point define majority of all state variables of the model. Mass points are targets of force loading by reason of accumulation of the mass. It can be imagined that the other objects serve for loading of them only.

Fig. 2: Mass point in the plane with cartezian coordinate system and its state variables
On fig. 2 a mass point is shown with index i including cartezian coordinate system and its state variables.
Every mass point has following attributes: standalone mass m0i, initial conditions xi(0)=x0i, yi(0)=y0i, vxi(0)=vx0i, vyi(0)=vy0i, boundary conditions (e.g. fixed value of a coordinate or a velocity component) and function of viscose damping. Function of viscose damping defines size of damping force Fdi:
 | (1) |
where vi is vector of mass point velocity, ci, c2i, c3i are given coefficients. The damping force is named as constant, according to size of mass mi. Its alternative named proportional means that force given by equation (1) is multiplied by size of mass mi.
As was mentioned, mass points are key objects of the dynamical system. The dynamical system can be now written in the following form:
 | (2) |
where mi is current mass of the mass point, which is the sum of standalone mass m0i and masses distributed from connected objects (e.g. from a translational spring). Symbols Rxi, Ryi means vector components of force resultant by which other objects loads the mass point, Fdxi, Fdyi are components of damping force and t is time.
Translational spring ensures connection of two mass points. Physical representation of a translational spring is a light and rigid telescopic bar with inner spring, see fig. 3. This spring loads both connected mass points by defined interaction force Ftij of the size given by arbitrary defined function dependent on spring elongation Δlij. The orientation of the force is the same as orientation of the spring.
Fig. 3: Translational spring and its angle
Translational spring has following basic attributes: reference length lij, initial angle counter cφ0ij (an integer number implicitly set to zero), references on two mass points, interaction function Ftij(Δlij) and damping function given by the same way as for a mass point. Additionally the spring has following optional attributes for user comfort: volume density ρij and area of cross-section Aij, from which the mass of the spring can be calculated and numerically distributed to the connected mass points.
Note that reference length of the spring lij can be in the application specified by a value or by initial or actual state of the dynamical system.
For spring elongation Δlij following applies:
 | (3) |
where laij is the current length of the spring.
Translational spring has one state variable: the angle counter cφij which helps to define its absolute rotation φaij. This variable is necessary due to requirement of calculation of rotation larger than 2π or smaller than zero. This necessity is in relation with definition of the rotational spring as will be described later. Coordinates of connected mass points can be in this sense used for calculation of constrained angle φsij from interval (0,2π) by relationship:
 | (4) |
where actual angle counter cφij is an integer number, which remain constant if change of the constrained angle φsij is in absolute values smaller than π. In the case when the change is larger than π the single increment is made according to the sign of value of change. This procedure enables possibility to consistently calculate arbitrary rotation of the spring.
Translational spring can be damped. Damping force has the same form as for mass points, see equation (1), but velocity in this equation is relative velocity of the second mass point according to the first mass point in the angle of the spring. Therefore this damping is acting only if the spring is changing its length.
Rotational spring ensures bending connection of two translational springs. Physical representation of a rotational spring is thin coiled elastic plate (e.g. spring inside mechanical watches) or elastic band around the hinge, which makes connection of two translational springs, see fig. 4. The rotational spring loads translational springs by moment Mrijk, which size is given by a function dependent on rotation of the rotational spring Δφijk. The moment Mrijk produces two couples of forces Frij and Frjk, which loads mass points i, j and k. These forces act perpendicularly to translational springs.
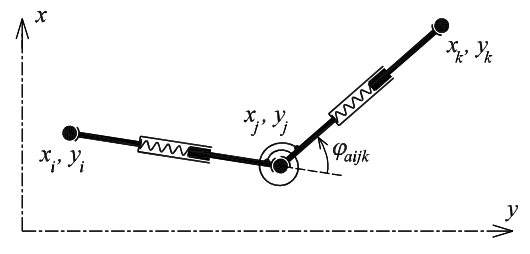
Fig. 4: Rotational spring
Rotational spring has following basic attributes: reference angle φijk, references on two translational springs, interaction function Mrijk(Δφijk) and damping function given by the same way as for a mass point and translational spring. Additionally the spring has following optional attributes for user comfort: mass mrijk and cross-section modulus Wijk. The modulus serves for calculation of normal stress, which is useful for monitoring of extreme stress of bended beams.
Note that reference angle φijk can be in the application specified by a value or by initial or actual state of the dynamical system (similarly as the reference length for a translational spring).
For rotation Δφijk of the spring applies:
 | (5) |
where φaijk is current angle between referenced translational springs -- difference between their current angles φaij and φajk.
Rotational spring has no state variable. Its state is unambiguously given by its attributes and by state of referenced translational springs.
Also rotational spring can be damped. Damping function has similar form as for mass points, see equation (1), but it is adopted for rotation into following relationship:
 | (6) |
where Mdijk is damping moment, which acts the same way as moment Mrijk, ωijk is current relative angular velocity between referenced translational springs -- difference between their current angular velocities ωij and ωjk.
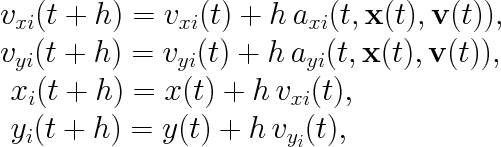
Dynamical system, its main equations (2) were described early, is solved in the application by numerical methods for solving ordinary differential equation with a given initial value. Particularly by explicit Euler method, modified explicit Euler method and by classical Runge-Kutta method (fourth order). The simplest Euler method solve equation system (2) as follows:
 | (7) |
where h is numerical step, functions of acceleration a are equal to right sides of equations of the dynamical system (2) and x, v represents all state variables. You can see that for calculation of new state is only neccessary to know values for previous state. This method is stable only for very small step and practically it is unusable.
Better results can be obtained by tiny modification of Euler method. Simply use velocities of the new state for calculation of new coordinates:
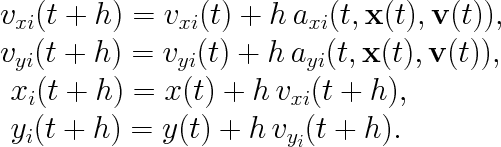 | (8) |
Classical Runge-Kutta method is more complicated. It gives more reliable results. See reference for more informations.
The homepage of the FyDiK application is http://fydik.kitnarf.cz.
Macur, J.: Dynamické systémy, http://www.fce.vutbr.cz/studium/materialy/Dynsys
Wikipedia, the free encyclopedia: Dynamical system, http://en.wikipedia.org
Wikipedia, the free encyclopedia: Euler method, http://en.wikipedia.org
Wikipedia, the free encyclopedia: Nonlinear system, http://en.wikipedia.org
Wikipedia, the free encyclopedia: Ordinary differential equation, http://en.wikipedia.org
Wikipedia, the free encyclopedia: Runge-Kutta method, http://en.wikipedia.org